

目标跟踪算法总结
一、目标跟踪算法简介
1. 单目标跟踪任务
单目标跟踪的通常任务是,在视频的第一帧给定任意一个目标的矩形框,在后续视频中跟踪这个目标。跟踪任务与识别、检测任务最明显的区别在于,跟踪目标可以是任意物体,类别不可知的。
2. 常用数据集
常用数据集整理:
3. 难点和挑战
目标遮挡、目标消失、运动模糊、目标和环境的剧烈变化、目标的高速运动、相机抖动、光照变化、背景杂乱、低分辨率等。具体挑战类别可以参考OTB官方属性介绍:

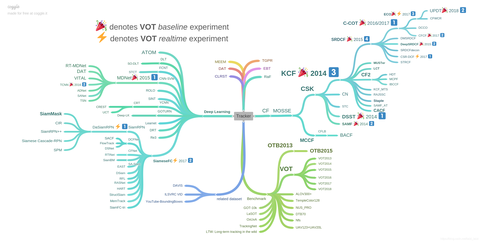
4. 分类
4.1 常规分类 (分类标准按照是否需要检测过程的参与)
生成式模型 (generative model):生成式算法采用特征模型描述目标的外观特征,最小化跟踪目标和候选目标之间的重构误差来确认目标。缺点是过于关注目标本身的特征,忽略背景信息,当目标外观剧烈变化或遮挡时容易出现目标漂移或丢失。常用算法: 光流法, 粒子滤波, Meanshift算法, Camshift算法, KCF, SRDCF, SRDCFdecon, 稀疏编码(sparse coding),在线密度估计(online density estimation)等。
判别式模型 (discriminative model):包括目标检测和跟踪,又称为tracking-by-detection。将目标跟踪看做一个二元分类问题,通过训练关于目标和背景的分类器从候选目标中确定目标。检测是指在图像中找出目标的位置,检测是跟踪的基础。常用算法: 多示例学习方法(multiple instance learning), 结构SVM(structured SVM), OAB, MEEM, TLD, 大多数深度学习算法等。
4.2 时间分类
早期跟踪模型:大部分是生成式模型,细分主要包括:
(1) 基于目标模型建模: 基于区域匹配,基于特征点跟踪,基于主动轮廓的跟踪,光流法等。
(2) 基于搜索的方法: 为了减少搜索范围,一种方式是通过预测减少搜索范围,如Kalman滤波,粒子滤波等;另一种是内核算法,使用最速下降法,向梯度下降方向对目标模板逐步迭代,直到跌倒在最优位置,如Meanshift, Camshift。
相关滤波模型:属于判别式模型,相关滤波之前,所有的跟踪都是在时域上进行,设计复杂的矩阵求逆计算,速度慢。相关滤波在频域上进行,利用训练矩阵可以在频域对角化的性质,减少运算量。常用算法: MOSSE, CSK, KCF, BACF, SAMF.
深度学习模型:基于相关滤波,使用深度学习对特征提取、特征搜索等方向进行改进。
二、常用算法介绍
1. 早期跟踪算法

2. 相关滤波算法
3. 深度学习算法
参考文献/链接
https://blog.csdn.net/u012477435/article/details/102841195本站所有文章、数据、图片均来自互联网,一切版权均归源网站或源作者所有。
如果侵犯了你的权益请来信告知我们删除。邮箱:dacesmiling@qq.com




