

揭秘仿人机器人背后的技术秘密 | 优必选研究院技术专家刘益彰
目前国际上主要有两种控制方式的仿人机器人:一种是基于位置控制的仿人机器人,另一种是基于力矩控制的仿人机器人。由于类人运动的功能的多样性、复杂性以及高维度性,所以仿人机器人的研究非常具有挑战性。
运动控制技术是仿人机器人中的核心关键技术。仿人服务机器人主要在办公场所、家庭环境、商业场景以及户外等复杂的非结构化环境中执行不同类型的复杂任务。智能机器人走进千家万户,会让人类的生活方式变得更加便捷化、智能化、人性化。
我们特邀优必选研究院技术专家刘益彰先生做客「机器人大讲堂直播间」为大家分享运动控制技术在仿人机器人中的应用。
本期分享要点如下
仿人机器人的发展历程仿人机器人的关键技术—运动控制运动控制在大型仿人机器人上的三大挑战Walker大型仿人服务机器人仿真平台优必选运动控制未来重点研究方向以下内容根据刘益彰先生直播分享实录整理。
一、仿人机器人发展历程
仿人机器人就是模仿人的形态和行为而设计制造的机器人,开始研制于上世纪60年代末,目前已经成为了机器人技术领域的主要研究方向之一。
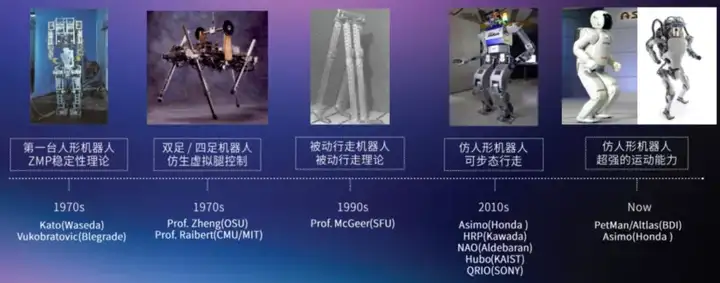
从早稻田大学的第一台仿人机器人WABOT-1至今已有近50年的历史,提出ZMP稳定性理论,到MIT设计出液压驱动的双足/四足机器人,提出了虚拟腿理论,采用三分控制法控制机器人运动。
之后出现了被动行走机器人,采用被动行走理论,利用重力和自然的惯性,在无驱动的状况下,能够稳定性行走,但步态单一,抗干扰能力差。至今已经出现了大批全自由度仿人机器人,可以实现超强的仿人运动能力。
二、仿人机器人的关键技术—运动控制
运动控制在仿人机器人中的运用主要体现在步态规划、力控制应用与视觉&导航技术的融合三个方面:
步态规划
1、双足建模
在做机器人步态时,ZMP(Zero Moment Point,零力矩点)的概念是非常关键的,那么什么是ZMP呢?
ZMP是支撑足受到的地面支反力(分布力)可以等效为一个合力,机器人所受和力矩为零的点。ZMP具有一定落在机器人和地面支撑区域范围内的特性,其在仿人和四足里都有广泛的应用,获取ZMP的方法主要有两种:
通常在脚踝附近安装六维力传感器来测量ZMP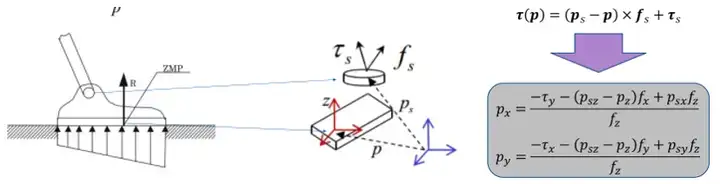
通过重力与惯性力的合力来定义ZMP的坐标计算公式,并用达朗贝尔原理进行推导。
在对仿人机器人做控制和规划时,一般不对其进行全身的动力学建模,而是对其做一个模型简化,简化模型有利于理论分析,以及控制力的快速设计与验证,一般简化的方式有以下几种:

倒立摆模型在仿人机器人即可实现简单的应用:

2、类人步态行走
在行走过程中,仿人机器人脚掌其实跟地面一直保持一个平行的状态,这样有利于增强机器人的整体稳定性。随着步长的增加,会出现腿长不足的情况。类似于人类“踮脚”来增加腿长,机器人可以通过脚底板翻转来增加腿长。


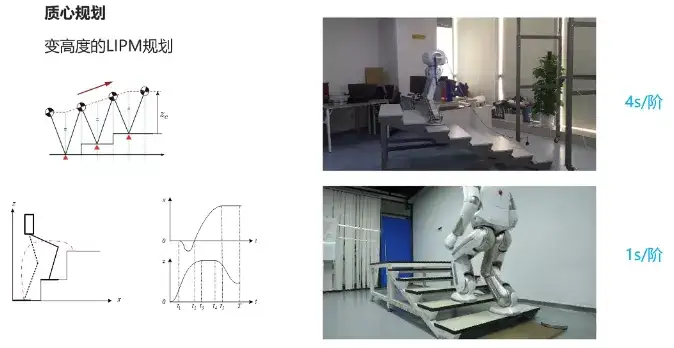
3、上下楼梯
仿人机器人的上下楼梯的步态用线性倒立摆的模型也可适用,但需要注意防止机器人的脚尖或脚跟碰到楼梯,下图展示了从静态的上下楼梯过渡到准动态上下楼梯。
力控制应用
1、基于关节力矩的力控
零重力模式基于关节力矩的力控在工业机器人中应用较多,其中零力拖动是较为成功的运用,运用的基础方法就是动力学辨识,这种方法也相对成熟。
仿人机器人中也常常需要机器人的柔顺控制,主要运用阻抗控制的概念,通过提取关节力矩或电流计算机器人末端受到的一个六维力和力矩,通过阻抗控制即可实现机器人的柔顺效果。

在双足的仿人机器人中同样需要机器人的平衡控制:


2、基于六维力传感器的力控
柔性使用六维力传感器可以省去使用关节力矩和电流进行估算末端力的时间,可以直接读取机器人所受的末端力,更加方便使机器人具备全身柔顺性,极大的提升机器人的环境适应能力。
抗性仿人机器人需要对外界的冲击具备一定的适应能力,使机器人处于稳定的状态。

仿人机器人要在不平整地面行走,需要在机器人脚踝上面加入柔顺控制,适应地面不平整。

与视觉&导航技术的融合
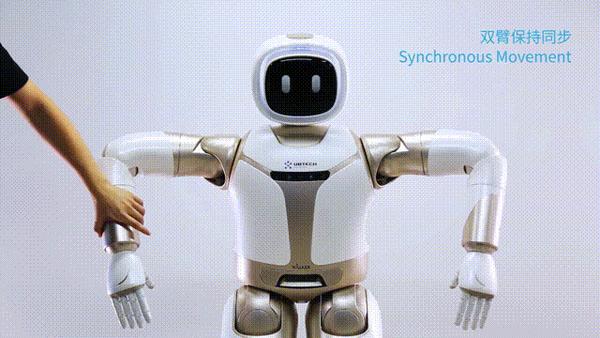
1、手眼协调

2、上下楼梯 - 与视觉的融合


3、骨骼提取和运动模仿
4、综合应用

三、运动控制在大型仿人机器人上的三大挑战
1、仿人机器人的本体设计
三种典型仿人机器人结构:

2、仿人机器人的安全性
主要是包括仿人机器人自身的安全性和对外界环境的安全性。机器人自身的安全性指的是可靠的运行、稳定的表现。对外界环境的安全性指的是在人与机器人进行交互的时候不会对人类造成伤害。
3、仿人机器人的智能性

四、Walker大型仿人服务机器人仿真平台
1、Walker大型仿人服务机器人
优必选始终秉持AI赋能、科技兴国的战略,自主研发的Walker机器人集成人工智能和机器人核心技术,充分展示了中国在硬科技领域的创新实力。Walker一经推出就受到国际顶级学术机构、权威媒体以及业界的关注与认可。Walker具备36个高性能伺服关节以及力觉、视觉、听觉和平衡等全方位的感知系统,在全身运动控制、复杂地形灵活行走、自平衡、手眼协调、视觉识别、柔顺控制、U-SLAM 视觉导航避障、智能安全交互等多方面实现了突破,开始真正走入人们的生活。
2、仿真简介
机器人动力学仿真是基于交互式计算机图形技术和机器人学理论,生成机器人的几何图形,并对其进行三维显示,用来描述机器人及工作环境的动态变化。
3、动力学仿真的目的和意义
动力学仿真伴随着机器人开发的整个周期,其在研发中会缩短开发周期,降低开发成本,减少设计风险。
4、Walker大型服务机器人仿真平台
5、Walker仿真系统架构
6、Push-Recovery动力学仿真
五、优必选运动控制未来重点研究方向
优必选作为国内知名的服务机器人企业,自成立初始,就一直持续进行大型仿人机器人的研发,主要研究方向是步态算法、机械臂控制与安全交互。
步态算法未来仍然会继续提升机器人运动能力,包括行走、对地面的适应性能力以及对外界冲击的适应能力等;机械臂操作方向,未来将会更加注重手眼协调、骨骼提取和运动模仿等;安全交互方向,主要包括机器人整体结构的设计以及算法的应用。伴随着AI技术、云平台以及仿人机器人运动控制技术的不断突破,仿人机器人将会诸多场景落地,如新零售、展览展示以及医用等环境。
- END -
私信我可领取完整版视频资料及PDF版文字内容。
本站所有文章、数据、图片均来自互联网,一切版权均归源网站或源作者所有。
如果侵犯了你的权益请来信告知我们删除。邮箱:dacesmiling@qq.com


