聊一聊 VR虚拟现实(十):一篇文章帮你分清VR与AR
VR 与 AR,作为一对难兄难弟,自打出生以来,就撇不清关系。很多时候,还会特意被“混为一谈”:XR。因为两者名称只差一个字母,很多眼镜也长的类似,所以经常有朋友分不清。对两者的应用场景也会有一些疑问,所以今天这篇文章就讲一下两者的区别。
先说一下定义:

VR,虚拟现实,是指视野中的整个环境都是虚拟出来的,跟现实场景可以没有任何关系。你在自己家客厅里带上VR眼镜,可以瞬间来到外星球,跟好友们一起玩太空对战游戏。电影《头号玩家》就是描绘了这样一个世界。
而AR,是指视野中仍然有现实世界的影像,但是在影像之上,额外叠加上虚拟的物体,叠加的物体需要跟现实场景能有“互动”,比如 能贴合到墙壁上,能放置在桌子上等,所以是对现实的增强,于是叫做增强现实。
AR 从具体实现上,又可以分 手机AR(下图) 和 AR 眼镜(上图)。手机AR是指透过手机屏幕看到现实场景,在场景上叠加上虚拟物体,相信很多人生活中都接触过,前些年大火的 《Pokemon Go》就是属于手机AR的范畴。这篇文章里,我们只介绍 AR眼镜这个方式。
AR 与 VR 光学结构上的区别
前面说到,AR是将虚拟物体叠加到显示场景中去,不要小看 “叠加” 这个词,就是多了这一步,使得 VR 和 AR 走上了完全不同的两条光学结构路线。
首先,VR的光学相对简单,其实就是一个凸透镜成像,但是,这种光学结构,也决定了它当前很难小型化,因为 屏幕和 镜片 之间需要保持一定的距离,以保证正确的成像。
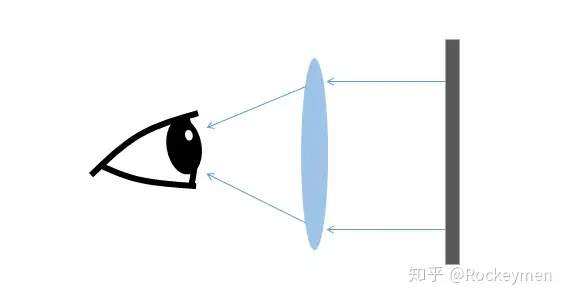
所以大家看到的VR眼镜都是一个很大的盒子。
而近些年流行的超薄pancake(饼干镜头)光学方案,通过镜片组合,使得整个光学结构厚度降低,重量也有望降到150g左右(不含外接电池和计算模块)这对佩戴体验有很好的提升。
未来会不会有更先进的光学系统(比如某种纳米级别的微镜头阵列)? 不得而知。

AR,因为在显示影像的同时,不能耽误看前面的景物,这就使得光学变得相对麻烦很多。
目前有三种主流的方案:
离轴反射、Birdbath、光波导
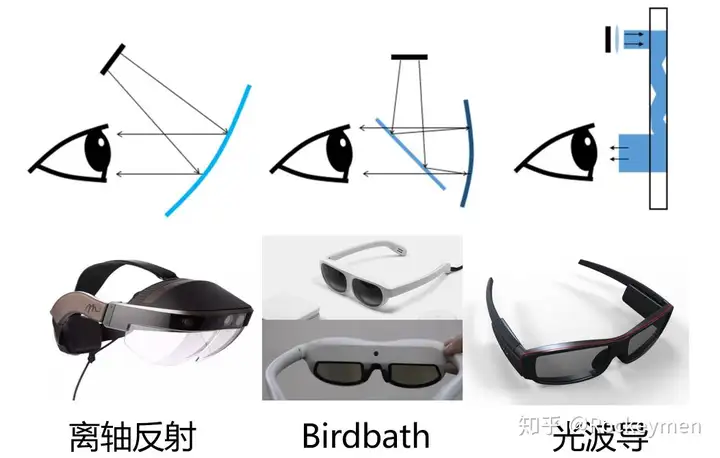
1. 离轴反射。代表产品有:Meta,RealMax,DreamGlass,LeapMotion
离轴反射的原理跟VR眼镜一样直观,显示屏的内容,通过一个透明的反射镜面,反射到眼睛里,而外面的景物,也透过这个镜面进入眼睛,从而实现了虚实景物的叠加。它的优点是结构简单,成本低,可实现的FOV较大,但是体积相应也最大。
2. Birdbath。代表产品是:联想Mirage,Nreal。
显示的内容被投在在一个半透的分光镜片上(下图中的斜45度镜片),它的好处是相比离轴反射方案,光学结构要小一些。
但是从下图的眼镜结构上看,跟我们平时用的眼镜还是有区别,无法做到日常佩戴。
3. 光波导。代表产品:Hololens,MagicLeap,DAQRI
光波导的原理略微复杂,总体上还可以分成 几何光波导和衍射光波导。在这里我们就不展开论述。它大体的概念是,成像光线从侧面在镜片内部通过反射传播,最终射入眼睛。因为它利用了镜片内部的空间进行传播,所以不需要增加额外的外部空间,也就使得整个眼镜可以做的很轻薄。
现在看来,光波导是最有希望成为AR眼镜终极形态的方案。但是,目前还主要存在 FOV (视场角)过小的问题。当前这几款利用光波导方案的AR眼镜,最大FOV也只有50度(而且还是对角线FOV),跟VR眼镜的100度FOV有很大差距,离人眼的150度FOV更是远的很。(见下图)

50度FOV什么概念呢?看过Magicleap宣传片的同学们一定记得一只大鲸鱼从体育馆地板一跃而出的震撼场景(如下图所示)。

但实际上,它在一个50度FOV的眼镜里显示的是这样式的:
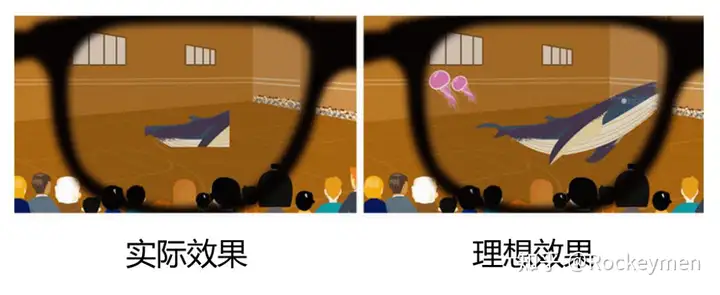
可见,当前AR眼镜的显示效果局限还很大,这会是阻碍其C端民用化的最大障碍。
AR 与 VR 在定位识别技术上的区别与联系
除了上文提到的光学结构上的不同,VR 和 AR 在定位识别技术上,也有一些区别。
AR的光学结构使其能够在现实场景之上叠加现实虚拟物体,但是这只是第一步。AR要想叠的准,还要需要 “理解” 眼前的现实场景,这就用到了SLAM(实时定位与建图)技术。
SLAM 全称是 Simultaneous Localization And Mapping,它是通过摄像头拍摄现实场景,检测追踪现实环境中的各种特征点,来对现实场景进行3D建模、平面检测等。只有对把现实场景的3D形态转化成数字信息后,虚拟物体才能比较真实的“放置” 到现实场景中。
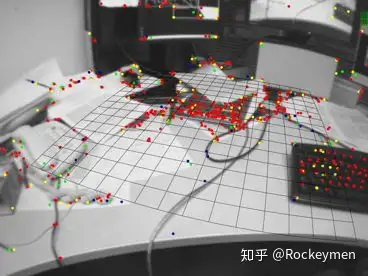
SLAM 技术可以说是AR中的核心技术,评价一款AR眼镜好不好,很重要的一点就是看它的SLAM做得快不快、准不准。
而 VR 中,因为所有的场景物体都是虚拟的,所以就不需要做SLAM来对现实环境进行检测和3D重建。但是为了正确地显示虚拟场景,它需要对头部的姿态做实时定位。
早期的VR眼镜的六自由度定位,都是靠在场地中架设额外的设备配合眼镜里的传感器来实现定位(OutsideIn),而近年来新兴起了 InsideOut 定位技术(下图所示),则是靠头盔上的自带的摄像头拍摄外部景物,来反向估计自己的姿态,进行定位。这就使得 VR 跟SLAM 也扯上了关系。

与早期的 OutsideIn 外部定位技术比,InsideOut 定位技术可以使用户免去了复杂的外部设备架设环节,使得VR眼镜使用上的便捷性上有了很大的提升。
除此之外,在渲染显示技术上,AR 也有更多挑战。
比如,AR需要用到光照估计技术,来计算出眼前场景的光线强度、光源位置,然后把虚拟的光线打在虚拟物体上,来保证虚拟物体更好的跟现实场景融为一体,防止穿帮。(VR中则不需要)

再比如,为了能让虚拟物体与实际物体看起来是在同样的距离上(比如在远处的建筑上放置一个虚拟物体),最理想的AR眼镜还需要支持多焦平面的显示,这个对传统的AR光学又是很大的挑战。(VR其实也需要类似的技术,但是迫切性小一些)

以上便是 VR 和 AR 眼镜技术中最重要的一些区别与联系,希望看完这篇文章,大家对 VR 和 AR 能有更好的区分。在下一篇文章里,我们将会继续探讨,这两种技术在未来会是怎样的前景?谁会更胜一筹? 敬请期待。
更多文章,也可关注本人专栏:逐鹿VR
想进入VR行业?先看看这篇文章:
相关文章:
聊一聊 VR虚拟现实(六):消灭距离
聊一聊 VR 虚拟现实(十一):VR 与 AR 谁主未来?
本站所有文章、数据、图片均来自互联网,一切版权均归源网站或源作者所有。
如果侵犯了你的权益请来信告知我们删除。邮箱:dacesmiling@qq.com
上一篇:虚拟现实(VR)技术名词解释